
Seguridad en el recorrido
Posibilidades de diferenciación
Dependiendo de la duración de la serie de clases y del nivel de los alumnos,
Aspectos motivacionales
El trabajo con vehículos de transporte sin conductor (AGV) está directamente relacionado con las experiencias cotidianas de los alumnos. Ya durante el entrenamiento de conducción, experimentan cómo unas pocas líneas de programa pueden poner en movimiento un vehículo de forma fiable, lo que supone una respuesta directa que motiva mucho y despierta la curiosidad. En el seguidor de carril digital, la relación con la vida cotidiana se refuerza mediante paralelismos con robots aspiradores, robots cortacésped o sistemas de asistencia al conductor, que reconocen líneas y evitan obstáculos de forma autónoma. La idea de que el AGV ahora puede «ver» y reaccionar como un robot fomenta la identificación con la tarea y aumenta el interés por las pruebas prácticas.
El seguidor de trazas analógico, con el uso de cámaras y la tecnología de control, ofrece una visión interesante de las tecnologías modernas de los vehículos
, como los asistentes de mantenimiento de carril. Aquí queda claro cómo los cambios en los parámetros o la adición de una parte diferencial influyen en el comportamiento de conducción, lo que supone un campo de experimentación motivador.
Por último, con el seguidor de líneas con IA, la inteligencia artificial pasa a ocupar un lugar central: los alumnos experimentan cómo el entrenamiento de una red neuronal mejora el comportamiento de conducción. Esto tiende un puente hacia los debates actuales sobre la IA en la vida cotidiana y ofrece a los alumnos la oportunidad de comprender y aplicar por sí mismos las tecnologías del futuro.
|
|
|
|
Giro de los motores con encoder |
Ajuste de la velocidad para la maniobra del vehículo |
|
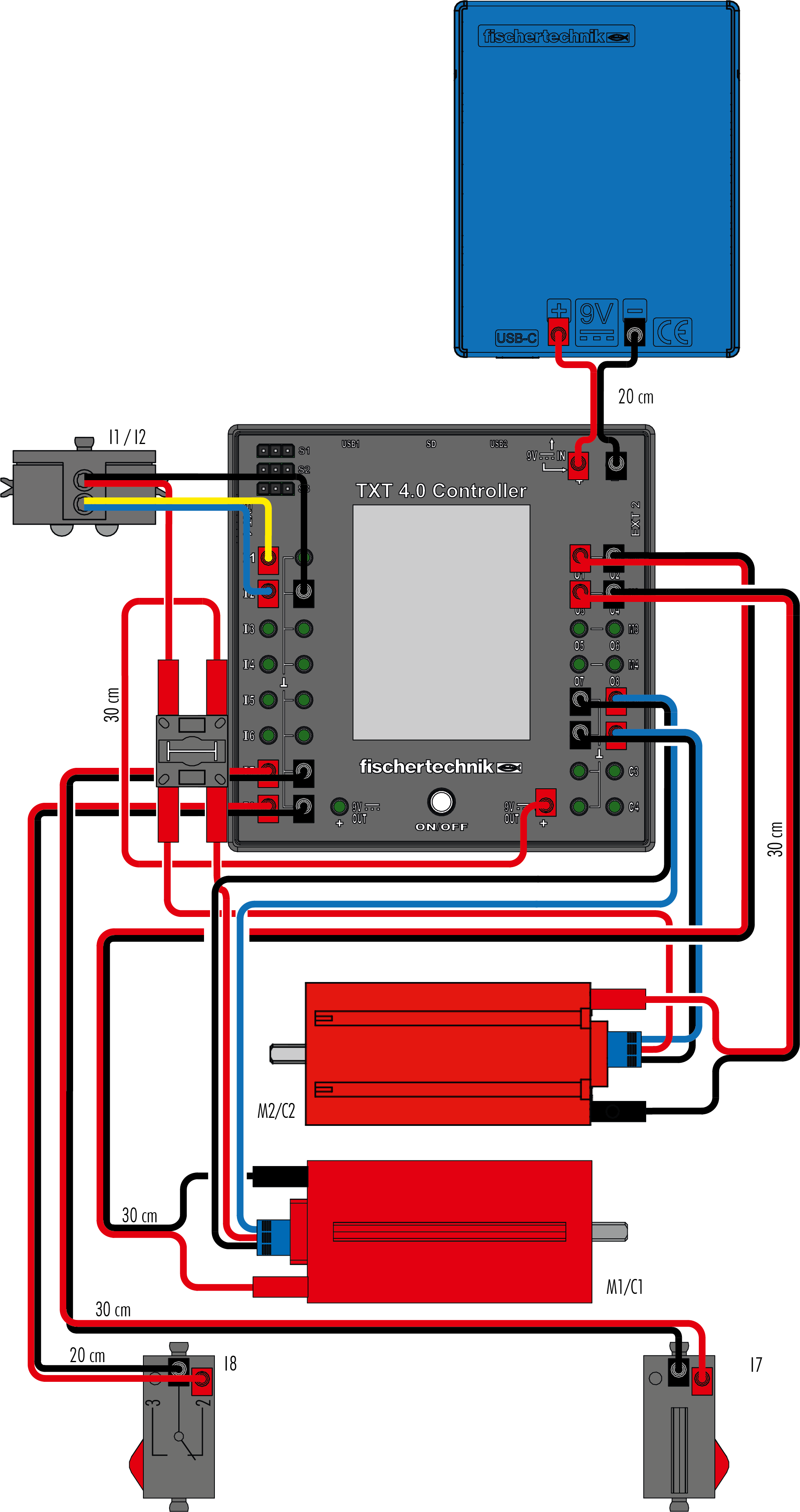
Mini pulsador |
Detección de obstáculos (AGV 1) |
|
|
|
| Medición de distancias | Prevención de colisiones (AGV 2, AGV 4) |
AGV 2: Detección de color mediante cámara USB |
Reacción a superficies de color |
AGV 3: Detección de carril mediante cámara USB |
Mantenimiento del carril mediante un regulador P y un regulador PD |
| AGV 4: Detección de carril mediante sensor de carril |
|
| Otras posibilidades de diferenciación | Optimización del control de velocidad, optimización de las estrategias para esquivar obstáculos, optimización de la estrategia para volver a encontrar el carril tras la pérdida completa del mismo, diseño de un vehículo propio con un equipamiento de sensores elegido libremente |
|
Sensores
|
Función |
|
1 pulsador On/Off en el controlador TXT 4.0 |
Encendido del AGV |
|
2 mini pulsadores |
Detección de obstáculos (AGV 1) |
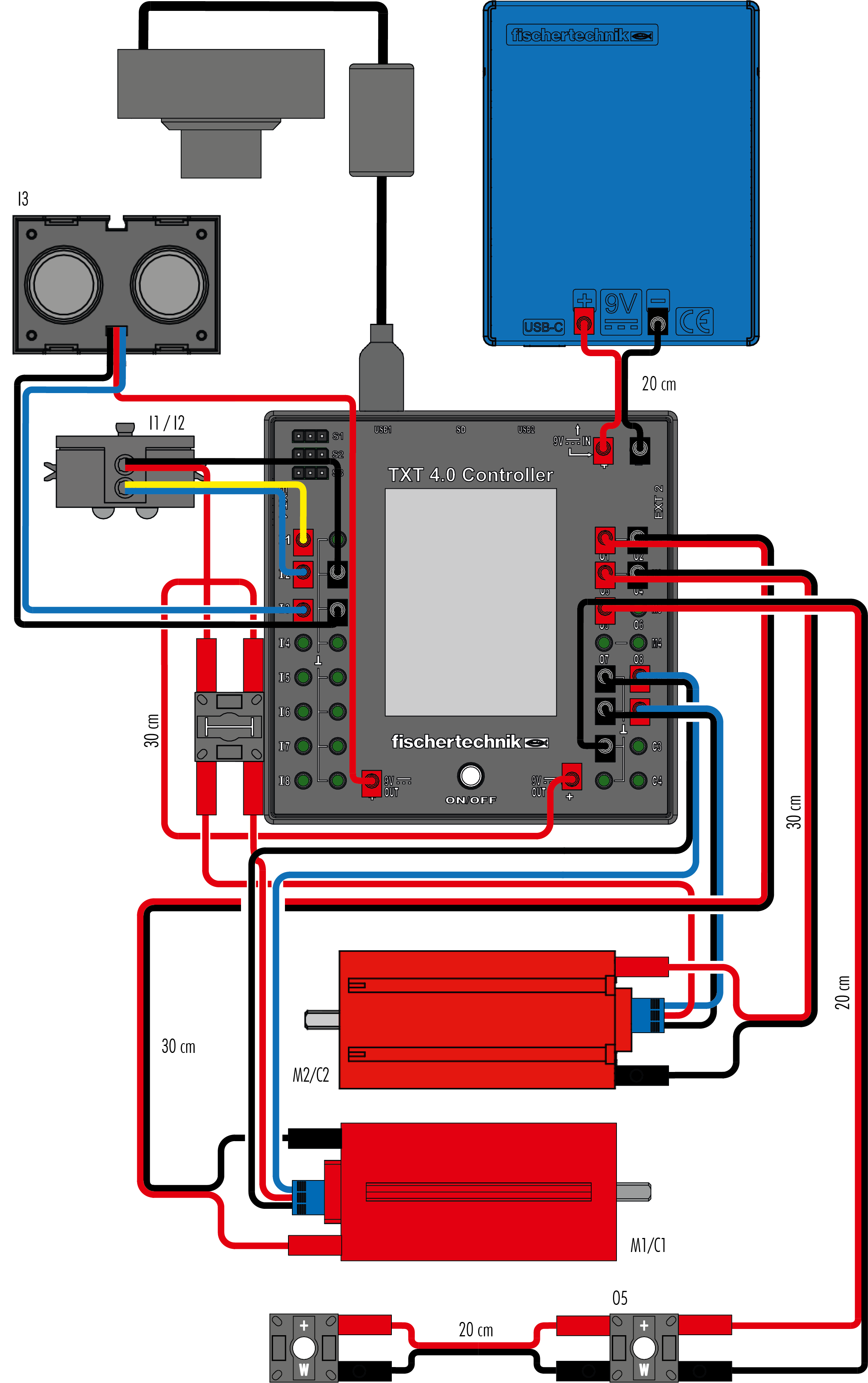
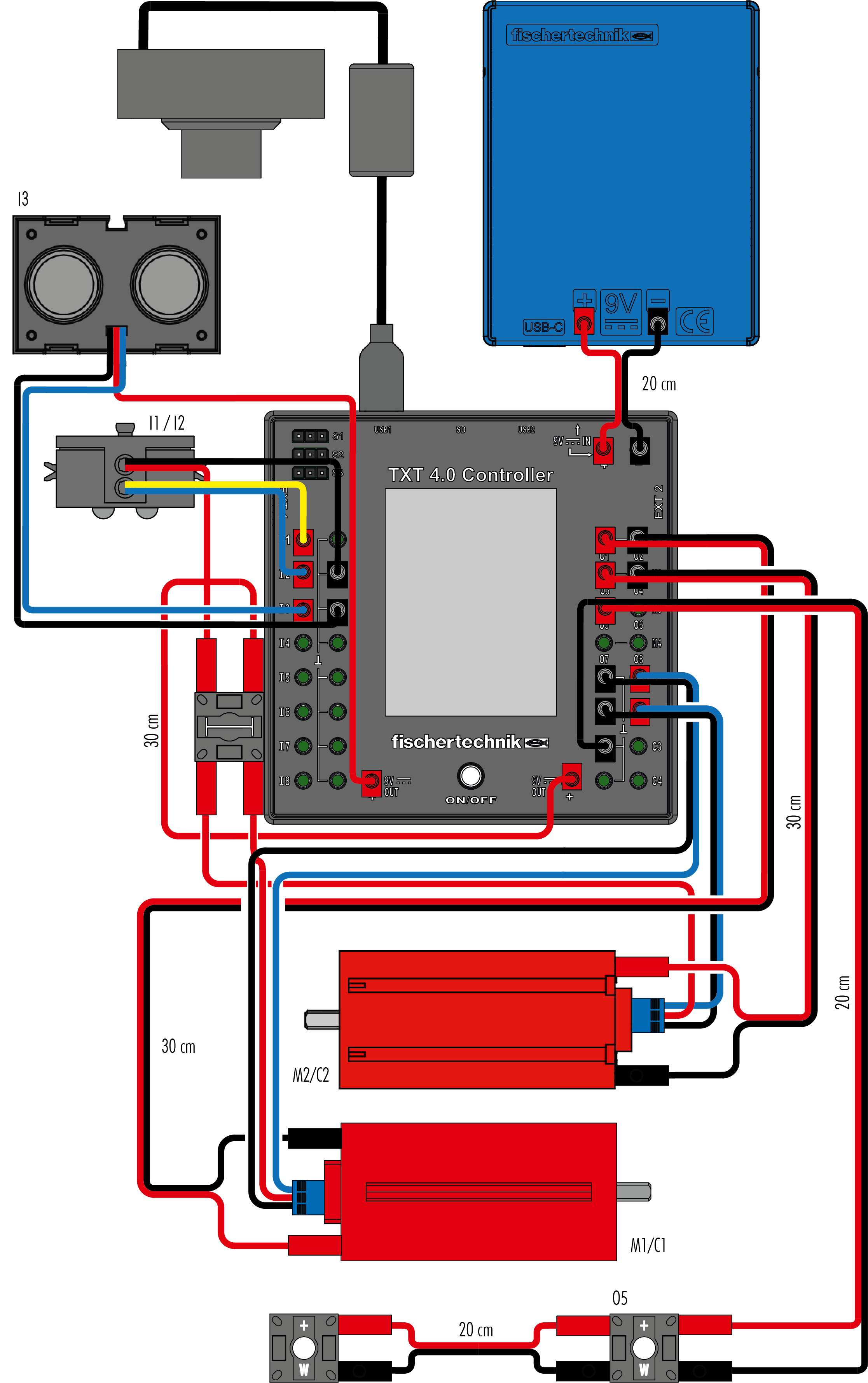
| 1 sensor de carril (con 2 sensores IR) | Detección de carril (AGV 1–2, AGV 4) |
| 1 sensor ultrasónico | Medición de distancia (AGV 2, AGV 4) |
| 1 cámara USB | Detección de color (AGV 2) Detección de carril (AGV 3) |
|
Actuadores |
Función |
|
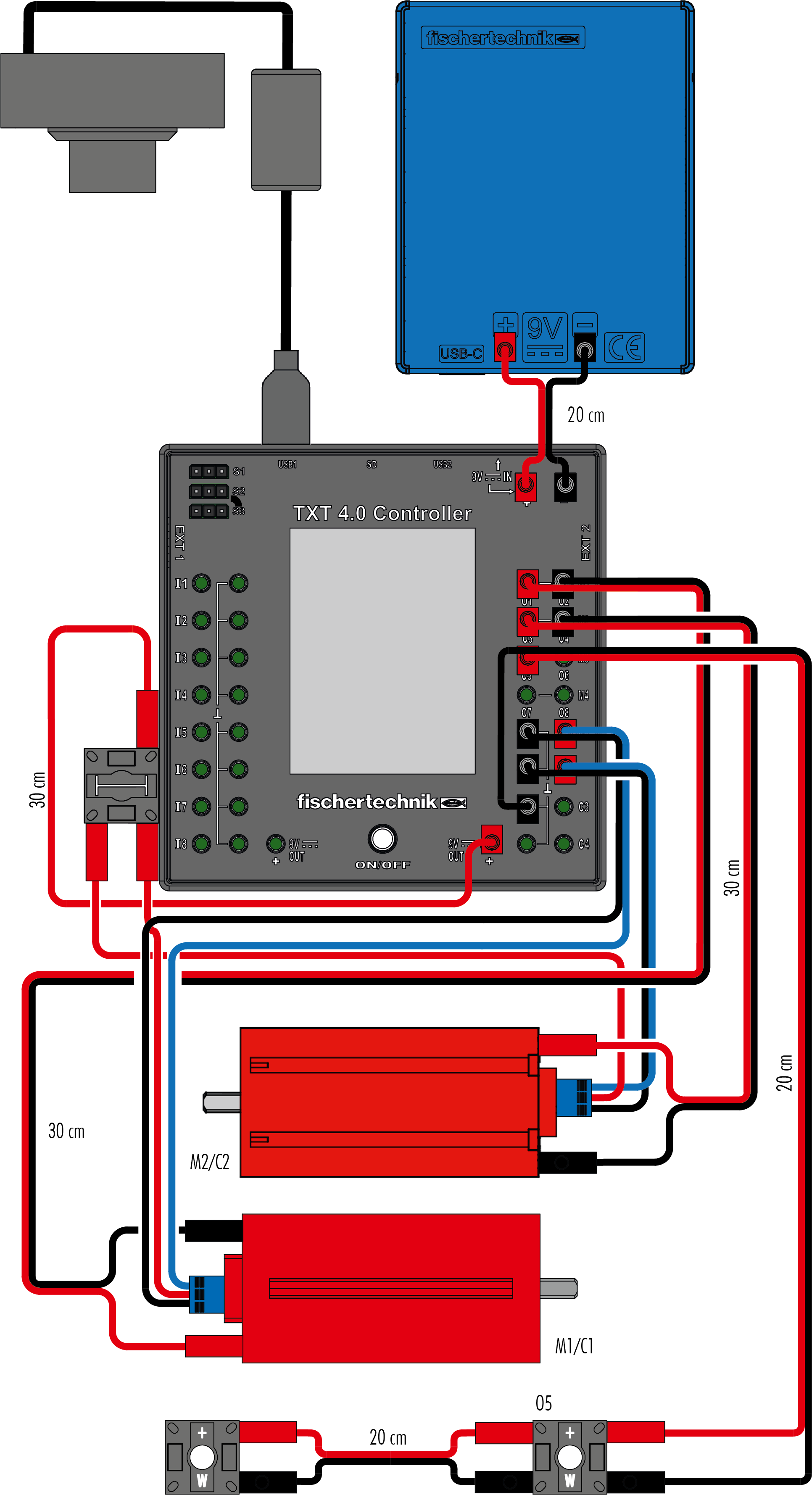
2 motores con encoder |
Accionamiento de los vehículos |
| 2 LED (2 × blancas) | Faros (AGV 2–4) |

{kind=link}
{kind=link}
{kind=link}
{kind=link}