
Sicher unterwegs im Parcours
Differenzierungsmöglichkeiten
Je nach Dauer der Unterrichtsreihe und der Stärke der SuS kann
Motivationale Aspekte
Das Arbeiten mit fahrerlosen Transportfahrzeugen (FTF) knüpft unmittelbar an Alltagserfahrungen der SuS an. Schon beim Fahrtraining erleben sie, wie bereits wenige Programmzeilen ein Fahrzeug zuverlässig in Bewegung setzen – eine direkte Rückmeldung, die eine hohe Motivationalität aufweist und Neugier weckt. Beim digitalen Spurfolger verstärkt sich der Alltagsbezug durch Parallelen zu Saugrobotern, Rasenmährobotern oder Fahrerassistenzsystemen, die Linien erkennen und Hindernisse selbstständig vermeiden. Die Vorstellung, dass das FTF nun wie ein Roboter „sehen“ und reagieren kann, fördert die Identifikation mit der Aufgabe und steigert das Interesse am praktischen Testen.
Der analoge Spurfolger eröffnet mit Kameranutzung und Regelungstechnik spannende Einblicke in moderne Fahrzeugtechnologien
wie Spurhalteassistenten. Hier wird deutlich, wie Parameterveränderungen oder die Hinzunahme eines Differentialanteils das Fahrverhalten beeinflussen – ein motivierendes Experimentierfeld.
Mit dem KI-Linienfolger schließlich rückt Künstliche Intelligenz in den Mittelpunkt: SuS erleben, wie das Training eines neuronalen Netzes das Fahrverhalten verbessert. Dies schlägt die Brücke zu aktuellen Diskussionen über KI im Alltag und gibt den SuS die Möglichkeit, Zukunftstechnologien selbst verstehen und anwenden zu können.
|
|
|
|
Drehung der Encodermotoren |
Geschwindigkeitsanpassung zur Fahrzeugsteuerung |
|
Mini-Taster |
Erkennen von Hindernissen (FTF 1) |
|
|
|
| Messung von Abständen | Kollisionsvermeidung (FTF 2, FTF 4) |
FTF 2: Farberkennung durch USB-Kamera |
Reaktion auf Farbflächen |
FTF 3: Spurerkennung durch USB-Kamera |
Spurhalten mithilfe eines P-Reglers und eines PD-Reglers |
| FTF 4: Spurerkennung durch Spursensor |
|
| Weitere Differenzierungsmöglichkeiten | Optimierung der Geschwindigkeitssteuerung, Optimierung der Strategien für das Umfahren von Hindernissen, Optimierung der Strategie für das Wiederfinden der Spur bei komplettem Spurverlust, Konzeption eines eigenen Fahrzeugs mit selbst gewählter Sensorausstattung |
|
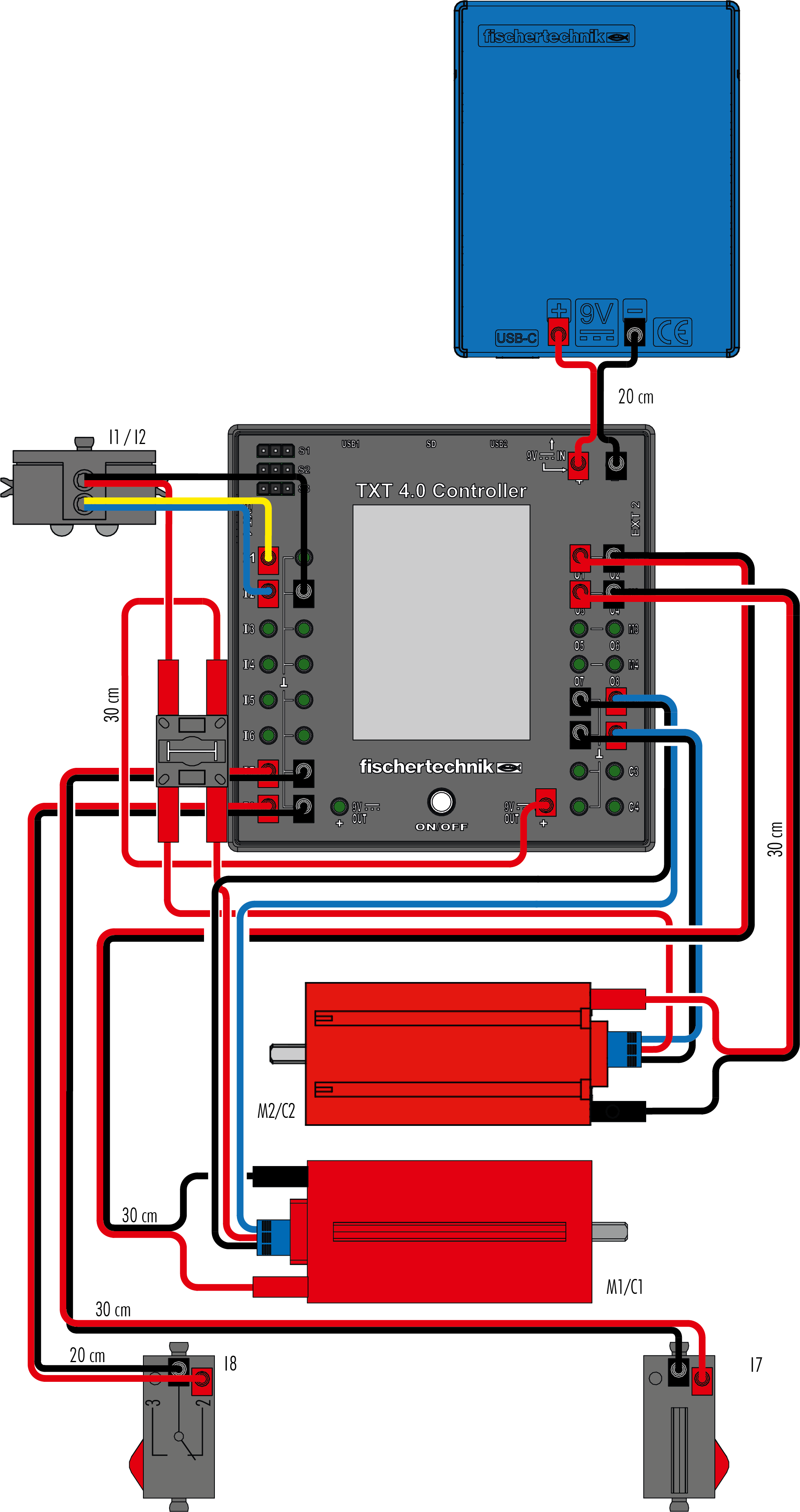
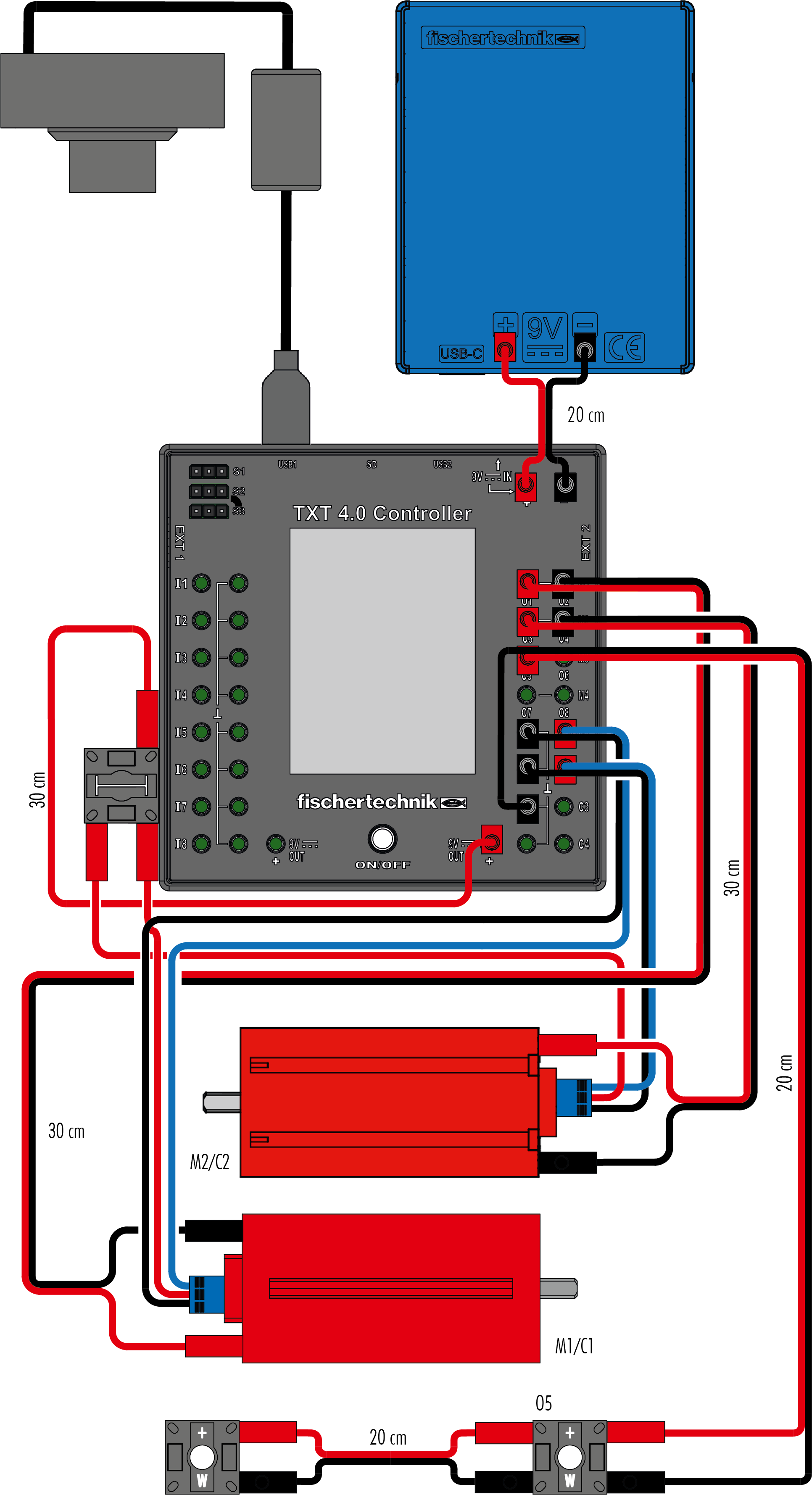
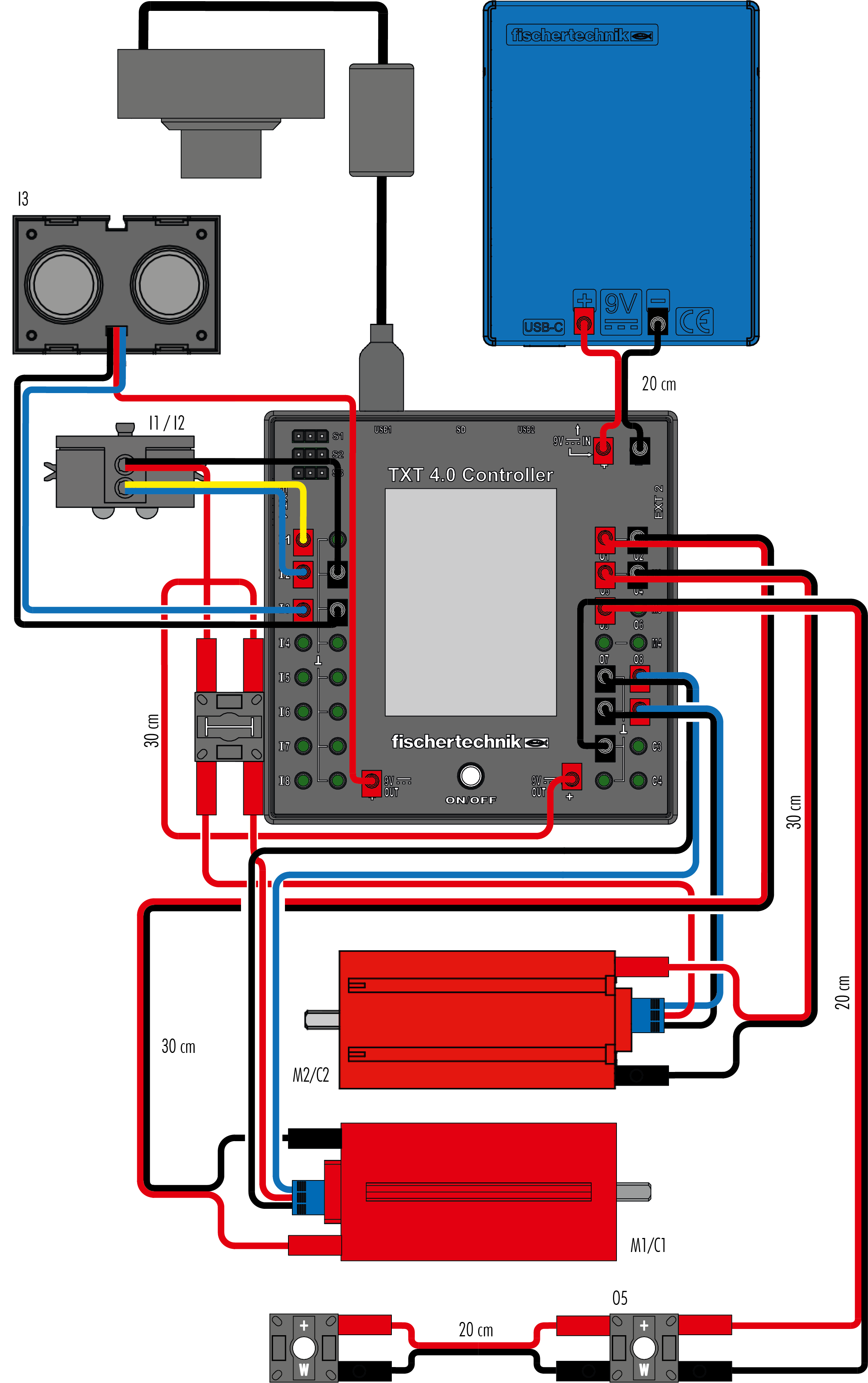
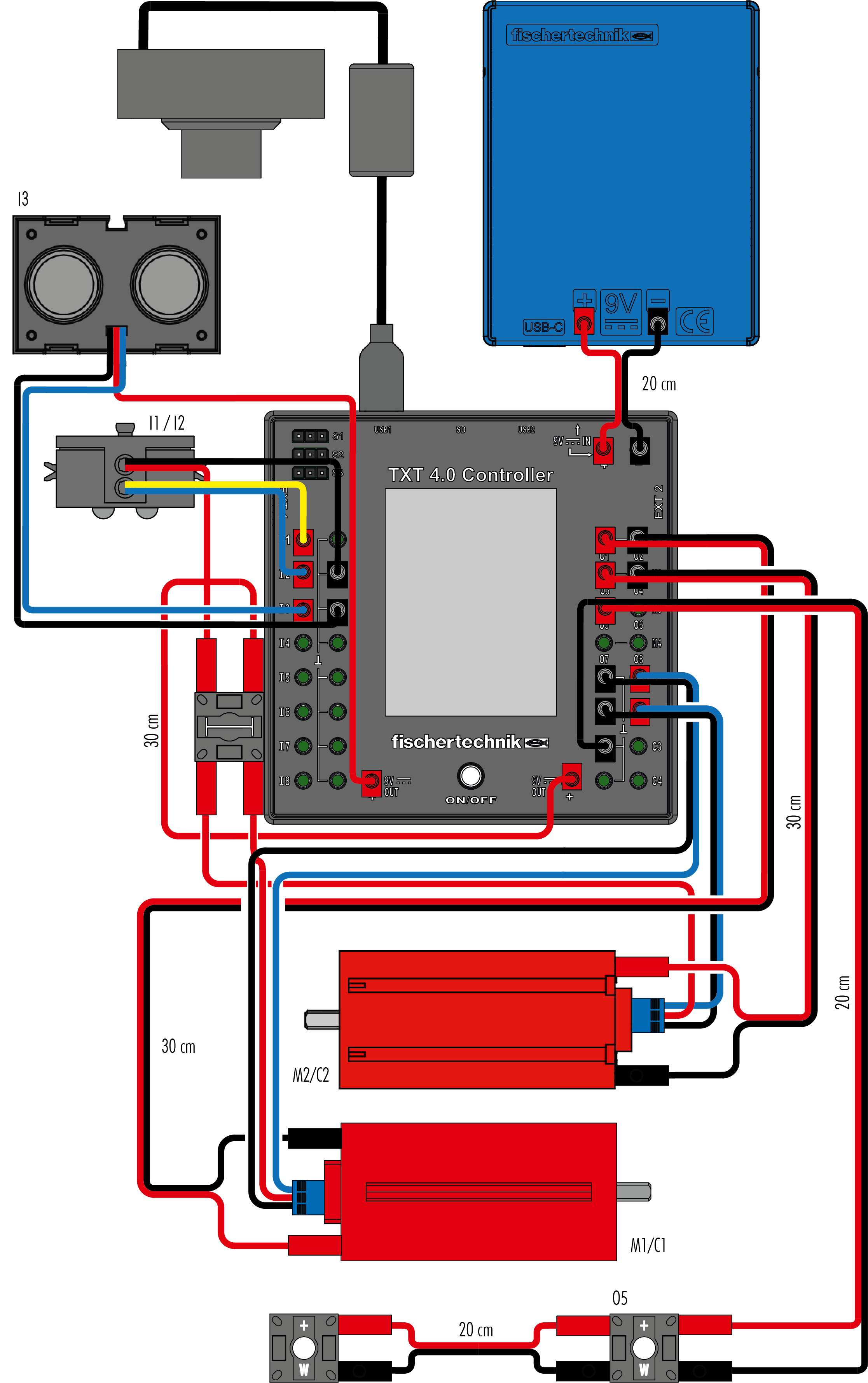
Sensoren
|
Funktion |
|
1 On/Off-Taster am TXT 4.0 Controller |
Einschalten des FTF |
|
2 Mini-Taster |
Hinderniserkennung (FTF 1) |
| 1 Spursensor (mit 2 IR-Sensoren) | Spurerkennung (FTF 1–2, FTF 4) |
| 1 Ultraschallsensor | Abstandsmessung (FTF 2, FTF 4) |
| 1 USB-Kamera | Farberkennung (FTF 2) Spurerkennung (FTF 3) |
|
Aktoren |
Funktion |
|
2 Encodermotoren |
Antrieb der Fahrzeuge |
| 2 LEDs (2 × weiß) | Scheinwerfer (FTF 2–4) |

{kind=link}
{kind=link}
{kind=link}
{kind=link}