
- Home
- Spielzeug
- E-Learning
- ROBOTICS Smarttech
Hallo!
Wir freuen uns, dass du dich für den Baukasten „ROBOTICS Smarttech“ von fischertechnik entschieden hast. Mit diesem Baukasten kannst du eine Menge interessanter Experimente durchführen und spannende Aufgaben lösen.
Beim Durchlesen des Begleitmaterials und Ausprobieren der Experimente und Aufgaben wirst du Schritt für Schritt lernen, wie man mit dem ROBOTICS TXT Controller von fischertechnik einfache und auch komplizierte Maschinen und Roboter steuern und programmieren kann.
Wie das beim Lernen nun mal so ist, kann man nicht sofort mit den schwierigsten Sachen anfangen, auch wenn die natürlich oft ein bisschen interessanter sind als die etwas einfacheren. Darum haben wir die Experimente und Aufgaben in diesem Heft so aufgebaut, dass du mit jeder neuen Aufgabe etwas anderes dazu lernst, dass du dann wieder bei der nächsten Aufgabe einsetzen kannst.
Also keine Angst, wir fangen klein an und arbeiten uns dann gemeinsam zu den großen Robotern vor.
Jetzt wünschen wir dir viel Spaß und Erfolg beim Experimentieren mit dem ROBOTICS Smarttech.
Dein Team von
fischertechnik

Ein paar allgemeine Infos
Bevor wir mit dem Baukasten so richtig loslegen können, musst du noch ein paar Dinge wissen. Die Bauteile, mit denen wir arbeiten werden, sind zwar sehr robust, aber wenn man sie nicht korrekt behandelt, können sie unter Umständen beschädigt werden.
Elektrizität
Wie du sicherlich weißt, funktionieren sehr viele Bauteile des Smarttechs mit elektrischem Strom. Und bei Sachen, die mit Strom zu tun haben, muss man besonders darauf achten, keine Fehler zu machen. Schau dir darum die Bauanleitung immer genau an, wenn es um das Verkabeln von elektrischen Bauteilen geht.
Auf keinen Fall darfst du den Plus- und den Minus-Pol einfach so miteinander verbinden, also kurzschließen. Dadurch kann der TXT Controller, oder auch der Akku, beschädigt werden. (Bild vom Baukasten E-Tronic?)
Elektrizität und Elektronik ist ein genauso interessantes Thema wie Robotik (also das, worum es in diesem Baukasten geht), und es gibt von fischertechnik einen Baukasten, der sich speziell mit diesen Themen beschäftigt. Wenn du dich also dafür interessiert, wirst du mit dem Baukasten „PROFI E-Tronic“ genau so viel Spaß haben wie mit dem Smarttech.
Roboter, der künstliche Mensch?
An was denkst du zuerst, wenn du das Wort „Roboter“ hörst? Hast du schon einmal einen Roboter gesehen? Im Kino oder Fernsehen? Oder vielleicht sogar schon in echt?
Es gibt unzählige verschiedene Arten von Robotern. Manche sehen ein bisschen aus wie ein Mensch, andere bestehen nur aus einem oder mehreren Armen. Was genau macht also einen Roboter zu einem Roboter?
Im Lexikon steht: „Roboter sind stationäre oder mobile Maschinen, die nach einem bestimmten Programm festgelegte Aufgaben erfüllen.“
ROBOTICS, (fast) alles automatisch
Roboter sind also Maschinen, die von einem Programm gesteuert werden. Und diese Steuerung von Maschinen (oder in unserem Fall Modellen) nennen wir „ROBOTICS“.
Mit dem „ROBOTICS Smarttech“ kannst du wunderbar in dieses Thema einsteigen. Denn der Baukasten enthält alles, was du zum Bauen und Steuern von vielen verschiedenen Maschinen brauchst.
Die Programme zum Steuern der Modelle kannst du am PC mit Hilfe der Software ROBO Pro 4.7.0 (oder höher) erstellen und anschließend per USB-, Bluetooth- oder WLAN Verbindung auf den TXT Controller übertragen. Der Controller „kontrolliert“ und steuert dann das Modell entsprechend der Programmierung, die du erstellt hast.
Das ist alles im Baukasten mit drin
Zunächst einmal findest du zahlreiche fischertechnik-Bausteine, außerdem Motoren, Lampen und Sensoren, sowie eine farbige Bauanleitung zum Bau der verschiedenen Modelle.
Wenn du die Bausteine alle ausgepackt hast, musst du einige Komponenten zuerst montieren, bevor du loslegen kannst (z. B. Kabel und Stecker). Welche das genau sind, ist in der Bauanleitung unter „Montagetipps“ beschrieben. Erledige das am besten gleich als Erstes.
Aktoren
Als Aktoren werden alle Bauteile bezeichnet, die eine Aktion ausführen können. Das bedeutet, wenn man sie an einen elektrischen Strom anschließt, werden sie in irgendeiner Form „aktiv“. Meistens kann man das direkt sehen. Ein Motor dreht sich, eine Lampe leuchtet, usw
Mini-Motor
Der Mini-Motor ist ein Elektromotor, der genau so lang und so hoch ist wie ein fischertechnik-Baustein. Außerdem ist er sehr leicht. Dadurch kannst du ihn an Stellen einbauen, an denen für die großen Motoren kein Platz ist.
Das Getriebe, das im Baukasten dabei ist, passt genau an den Mini-Motor. Der Mini-Motor ist für eine Versorgungsspannung von 9 Volt und einen Stromverbrauch von maximal 0,3 Ampere ausgelegt.

LEDs
Das LED ist im Baukasten enthalten. Es kann sehr vielfältig verwendet werden. Zum Beispiel als Signallichter bei einer Ampel, als Blinklicht an einem Roboter oder zur besseren Ausleuchtung des Bildes, das die Kamera liefert, die ebenfalls im Baukasten enthalten ist.
Das LED ist für eine Spannung von 9 Volt ausgelegt und verbraucht ca. 0,01 Ampere Strom.
Achtung:
Beim Anschluss des LED an die Stromversorgung musst du auf die richtige Polung achten. Der Plus-Pol muss bei der + Markierung an das LED angeschlossen werden.

Sensoren
Sensoren sind gewissermaßen die Gegenstücke zu den Aktoren. Denn sie führen keine Aktionen aus, sondern reagieren auf bestimmte Situationen und Ereignisse. Ein Taster reagiert zum Beispiel auf einen „Knopfdruck“, indem er einen elektrischen Strom durchlässt oder unterbricht. Ein Wärmesensor reagiert auf die Temperatur in seiner Umgebung.
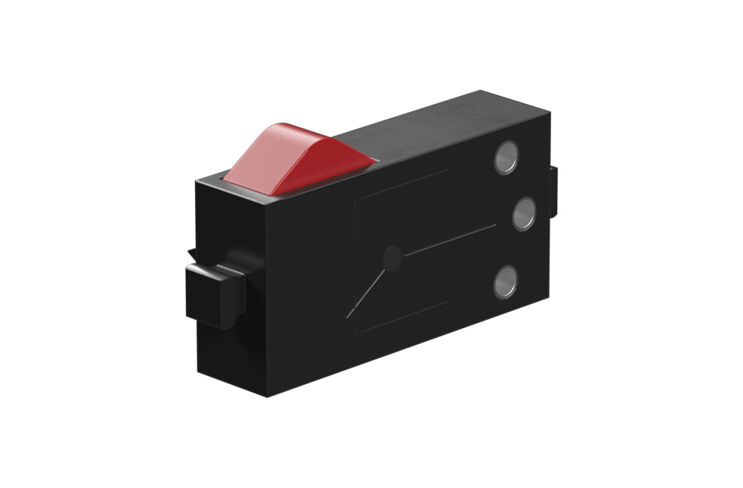
Taster
Der Taster wird auch Berührungssensor genannt. Beim Betätigen des roten Knopfes wird mechanisch ein Schalter umgelegt, es fließt Strom zwischen den Kontakten 1 (mittlerer Kontakt) und 3. Gleichzeitig wird der Kontakt zwischen den Anschlüssen 1 und 2 unterbrochen. So kannst du den Taster auf zwei verschiedene Arten verwenden:
Als „Schließer“:
Kontakte 1 und 3 werden angeschlossen. Taster gedrückt: Es fließt Strom. Taster nicht gedrückt: es fließt kein Strom
Als „Öffner“:
Kontakte 1 und 2 werden angeschlossen. Taster gedrückt: Es fließt kein Strom. Taster nicht gedrückt: Es fließt Strom.
Gestensensor
Der Gesten-Sensor ist ein neuer Sensorbaustein von fischertechnik. Er ist ein kleines Multitalent mit den Funktionen Gestenerkennung, Farberkennung, Abstandsmessung und Umgebungslichterfassung. Der Sensor selbst und wie er programmiert wird, ist in der Aufgabe „Dämmerungsschalter“ näher erklärt.

Grundlagen zu den fischertechnik Omniwheels
Das Mecanum-Rad ist ein Rad, das einem damit ausgestatteten Fahrzeug omnidirektionale Fahrmanöver (Bewegung in jede Richtung) erlaubt, ohne mit einer mechanischen Lenkung ausgestattet sein zu müssen. Daher heißen unsere Räder Omniwheels.
Es wird manchmal nach seinem Erfinder Bengt Ilon auch Ilon-Rad genannt. Im Gegensatz zum Allseitenrad stehen beim Mecanum-Rad die Rollen in einem Winkel zur Hauptachse.
Und wie funktioniert das?
Auf dem Umfang (der „Felge“) des Rades sind mehrere drehbar gelagerte tonnenförmige Rollen meist im Winkel von 45 Grad zur Achse des gesamten Rades angebracht. Nur diese Rollen stellen den Kontakt zum Boden her. Sie haben keinen direkten Antrieb und können sich frei um ihre schräge Lagerachse drehen.
Das gesamte Mecanum-Rad dagegen wird von einem Antriebsmotor z.B. Mini Motor und einem Getriebe mit veränderlichem Drehsinn und variabler Drehzahl angetrieben.
Die damit ausgestatteten Fahrzeuge haben üblicherweise vier solcher Räder, die im Rechteck („Wagenanordnung“) angeordnet sind.
Die Achsen der geneigten Rollen müssen dabei an der Auflageebene entweder sternförmig zur Fahrzeugmitte zeigen oder alle Winkelachsen der Rollen müssen auf einer Kreisprojektion liegen (unterschiedliche Wahl der Winkel der Rollen an Vorder- und Hinterachse – jeweils +45° oder −45° zur Achse des Mecanum-Rades).
Wird dieses Kriterium nicht beachtet, lassen sich keine omnidirektionalen Antriebskräfte erzeugen. Nur mit der Anordnung der Auflageflächen in Kreisprojektion ist eine Drehung um deren Mittelpunkt möglich, was in den meisten Anwendungsfällen gewünscht ist.
Noch etwa Technisches:
Die Drehzahl und die Drehrichtung eines jeden Rades ist einzeln ansteuerbar. Im Extremfall kann so ein Fahrzeug lediglich durch gegensätzlichen Drehsinn von Rädern der Vorder- und Hinterachse quer verfahren, ohne sich „vorwärts“ zu bewegen oder eine Drehung, um die Mittelachse ausführen zu müssen.
Um optimal auf die Programmierung der Modelle vorbereitet zu sein, kannst du dir hier ein Übersichtsblatt zum Antrieb und zu den Drehrichtungen der Omniwheels herunterladen.
ROBOTICS TXT Controller
Der ROBOTICS TXT Controller ist das Herzstück dieses ROBOTICS Baukastens. Er steuert die Aktoren, und wertet die Informationen der Sensoren aus.
Für diese Aufgabe verfügt der TXT Controller über zahlreiche Anschlüsse, an die du die Bauteile anschließen kannst. Welche Bauteile man an welche Anschlüsse anschließen kann, und was die Funktionen der Anschlüsse sind, ist in der Bedienungsanleitung zum TXT Controller beschrieben.
Über das farbige Touch Display kannst du den TXT Controller komfortabel bedienen. Ein besonderer Leckerbissen ist die integrierte Bluetooth- und WLAN Schnittstelle. Über sie kannst du ohne Kabel Deinen PC mit dem TXT Controller verbinden, oder auch mehrere Controller untereinander.
Wie der Controller mit den einzelnen Bauteilen umgeht und was diese im Einzelnen machen sollen, legst du durch das Programm fest, das du in der Software ROBO Pro schreibst.
Software ROBO Pro 4.7.x
ROBO Pro ist eine grafische Programmieroberfläche, mit der du die Programme für den ROBOTICS TXT Controller erstellen kannst.
„Grafische Programmieroberfläche“ bedeutet, dass du die Programme nicht Zeile für Zeile von Hand „schreiben“ musst, sondern mit Hilfe von grafischen Symbolen einfach bildlich zusammenstellen kannst. Ein Beispiel für so ein Programm siehst du links abgebildet.
Wie man so ein Programm genau erstellt, ist in dem Kapitel „Erste Schritte“ ausführlich beschrieben. Auch die ROBO Pro Hilfe zeigt dir in den Kapiteln 3 und 4 wie das funktioniert.
Ein paar Tipps
Experimentieren macht am meisten Spaß, wenn die Experimente auch funktionieren. Darum solltest du beim Aufbauen der Modelle ein paar Grundregeln beachten:
Interface-Test
Auch hier nochmal der Hinweis: Prüfe die Funktion der einzelnen Bauteile mit Hilfe des Interface-Tests in ROBO Pro.
Kurzschlüsse
Einen Kurzschluss hast du dann, wenn sich ein Plus- und ein Minusanschluss berühren. Sowohl der Akku als auch der TXT Controller haben eine Sicherung eingebaut, so dass sie bei einem Kurzschluss nicht beschädigt werden. Sie schalten die Stromversorgung einfach für eine Weile ab. Dein Modell funktioniert dann jedoch auch nicht mehr.
Kabel und Verkabelung
Wenn ein elektrisches Bauteil überhaupt nicht funktioniert, prüfe einmal das Kabel, mit dem du es an den TXT Controller angeschlossen hast. Verbinde dazu mit dem Kabel den Akku und die Linsenlampe. Leuchtet die Lampe auf, sollte das Kabel in Ordnung sein. Auch falsch montierte Stecker (z. B. ein grüner Stecker auf einem roten Kabel) können eine Fehlerquelle sein.
Prüfe auch, ob „+“ und „–“ richtig angeschlossen sind. Vergleiche dazu dein Modell mit den Bildern in der Bauanleitung.
Stromversorgung
Kleine Aussetzer oder langsam laufende Motoren deuten meistens auf einen leeren Akku hin. In diesem Fall solltest du den Akku mit dem Ladegerät aufladen. Der Akku ist vollständig geladen, wenn die rote LED am Ladegerät aufhört zu blinken und durchgehend leuchtet.
Wackelkontakt
Ein Bauteil, das abwechselnd mal funktioniert und dann wieder nicht mehr funktioniert, hat vermutlich irgendwo in seiner Verkabelung einen Wackelkontakt.
Die häufigsten Ursachen dafür sind:
Fehler im Programm
Auch wenn es niemand gerne zugibt: Jeder macht Fehler. Und vor allem bei komplexeren Programmen schleicht sich so ein Fehler ganz schnell ein.
Wenn du also am Modell selber alles überprüft, und alle Fehler beseitigt hast, und dein Modell trotzdem nicht das macht was du willst, dann solltest du auch noch dein Programm überprüfen. Gehe es Stück für Stück durch und kontrolliere, ob du den Fehler findest.
Im Online-Modus, also wenn der TXT Controller mit dem PC verbunden ist, kannst du das Programm auch am Bildschirm verfolgen, während es läuft. Das jeweils aktive Programmelement wird hervorgehoben, so dass du immer sehen kannst, an welcher Stelle das Programm gerade ist und wo der Fehler auftritt.
Der letzte Joker
Wenn du trotz allem den Fehler nicht gefunden hast, gibt es noch eine Möglichkeit, wie du Hilfe bekommen kannst:
Der E-Mail-Joker
Du kannst uns bei fischertechnik eine E-Mail schicken, und uns dein Problem schildern. Die E-Mail-Adresse ist info@fischertechnik.de.
Noch nicht am Ende
War‘s das jetzt schon? Nein, natürlich nicht. Die Experimente und Modelle, die du in diesem e-Learning kennen gelernt und ausprobiert hast, sollen nur der Anfang sein. Sozusagen deine ersten „Gehversuche“ in dem riesigen und spannenden Themenbereich „ROBOTICS“.
Fantasie
Was wir dir hier gezeigt haben ist nur ein winziger Teil der Möglichkeiten, die du mit dem TXT Controller und den fischertechnik Bauteilen hast. Und ab jetzt bist du selber gefragt. Du darfst deiner Fantasie freien Lauf lassen und einfach mal drauf los bauen.
Vorhandenes ändern
Wenn du noch keine Idee für ein komplett eigenes Modell hast, dann schau dir doch einfach mal die Modelle aus diesem Heft an. Vielleicht fällt dir ja etwas ein, was du an einem Modell anders machen würdest. Oder du veränderst die Funktion eines Modells.
Zeichenmaschine
Zum Beispiel könnte man am Fahrroboter auch einen Stift befestigen, der dann hoch und runtergelassen werden kann und auf einem großen Papier malt, während der Roboter darüberfährt. Du kannst dann Figuren nicht nur abfahren, sondern sogar aufzeichnen. Und aus dem Fahrroboter ist eine Zeichenmaschine geworden.
Wettrennen mit Freunden
Du kannst mit einem dicken Filzstift auch einen eigenen Parcours auf ein Papier zeichnen und den Roboter daran entlangfahren lassen. Und wenn Freunde von dir auch einen TXT Controller haben, dann wird es noch interessanter. Dann könnt ihr Wettrennen veranstalten, wessen Roboter schneller einen vorgegebenen Parcours meistert.
Kabellos losgelöst
Hat dein Rechner eine WLAN-Schnittstelle? Wenn ja, dann kannst du den TXT Controller anstatt über ein USB-Kabel auch über WLAN mit dem Rechner verbinden. Wenn nicht, kannst du dir auch einen USB-WLAN-Stick kaufen und darüber den TXT Controller kabellos mit deinem PC verbinden. Wie das geht kannst du in der Bedienungsanleitung des TXT Controllers und auf https://www.fischertechnik.de nachlesen.
Ausdauer lohnt sich
Also, worauf wartest Du? Los geht‘s. Erfinde und experimentiere. Und lass dich nicht von kleinen Rückschlägen aufhalten. Zum Experimentieren gehört vor allem auch Geduld und Ausdauer. Die Belohnung ist danach ein funktionierendes Modell.
Beim Ausprobieren deiner eigenen Ideen wünschen wir dir viel Spaß!