Introdução aos robôs industriais
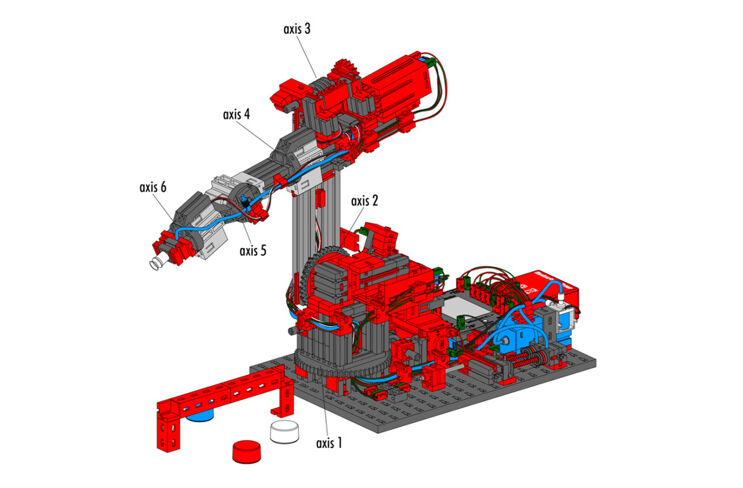
Robôs industriais se tornaram uma parte integral da indústria moderna de manufatura. Eles são principalmente utilizados em fábricas para realizar tarefas repetitivas rapidamente e com alta precisão. Nesta introdução, analisaremos sua estrutura e funcionalidade básica. Também examinaremos a história do seu desenvolvimento e descobriremos por que os robôs industriais se tornaram indispensáveis em muitas indústrias hoje.