
O robô anti-migalhas
Possibilidades de diferenciação
O modelo é especialmente adequado para a construção sistemática e para experimentar diferentes modos de condução por meio da alteração do ângulo de correção durante a condução. Através da diferenciação, o veículo pode ser ampliado com pouco esforço para incluir um sensor adicional (sensor de gestos RGB) para aumentar o grau de autonomia.
Aspectos motivacionais
O desejo de construir um veículo que se controle de forma o mais autônoma possível, utilizando vários sensores diferentes, é grande. Pode haver também interesse em complementar o sistema com outros componentes úteis (por exemplo, interruptor principal, interruptor traseiro, otimização da função do limpador por meio da integração de um reservatório de gotas …). Isso pode ser abordado durante a conversa em aula.
|
Função do equipamento
|
Solução técnica |
|
Acionamento da limpeza
|
Pressionar o botão de início no controlador RX |
|
Limpeza frontal
|
Ativação dos dois motores |
|
Colisão com obstáculo
|
Acionamento de um dos botões, parada dos motores |
|
Correção da direção devido a obstáculo detectado à direita
|
Recuar o veículo, girar cerca de 20° (4 impulsos) para a esquerda, continuar o percurso
|
|
Correção da direção devido a obstáculo detectado à esquerda
|
Recuar o veículo, girar cerca de 20° (4 impulsos) para a direita, continuar o percurso
|
|
Nova limpeza frontal
|
Ativação dos dois motores
|
|
Diferenciação: Acionamento da proteção contra queda na borda da mesa
|
Parada dos motores, marcha ré dos motores e contagem dos impulsos, mudança de direção, continuação do percurso
|
|
Troca do meio de limpeza
|
Abrir o dispositivo de fixação para um pano de limpeza na parte traseira do veículo |
|
Ajuste do meio de limpeza
|
Ajustar a articulação da fixação do limpador |
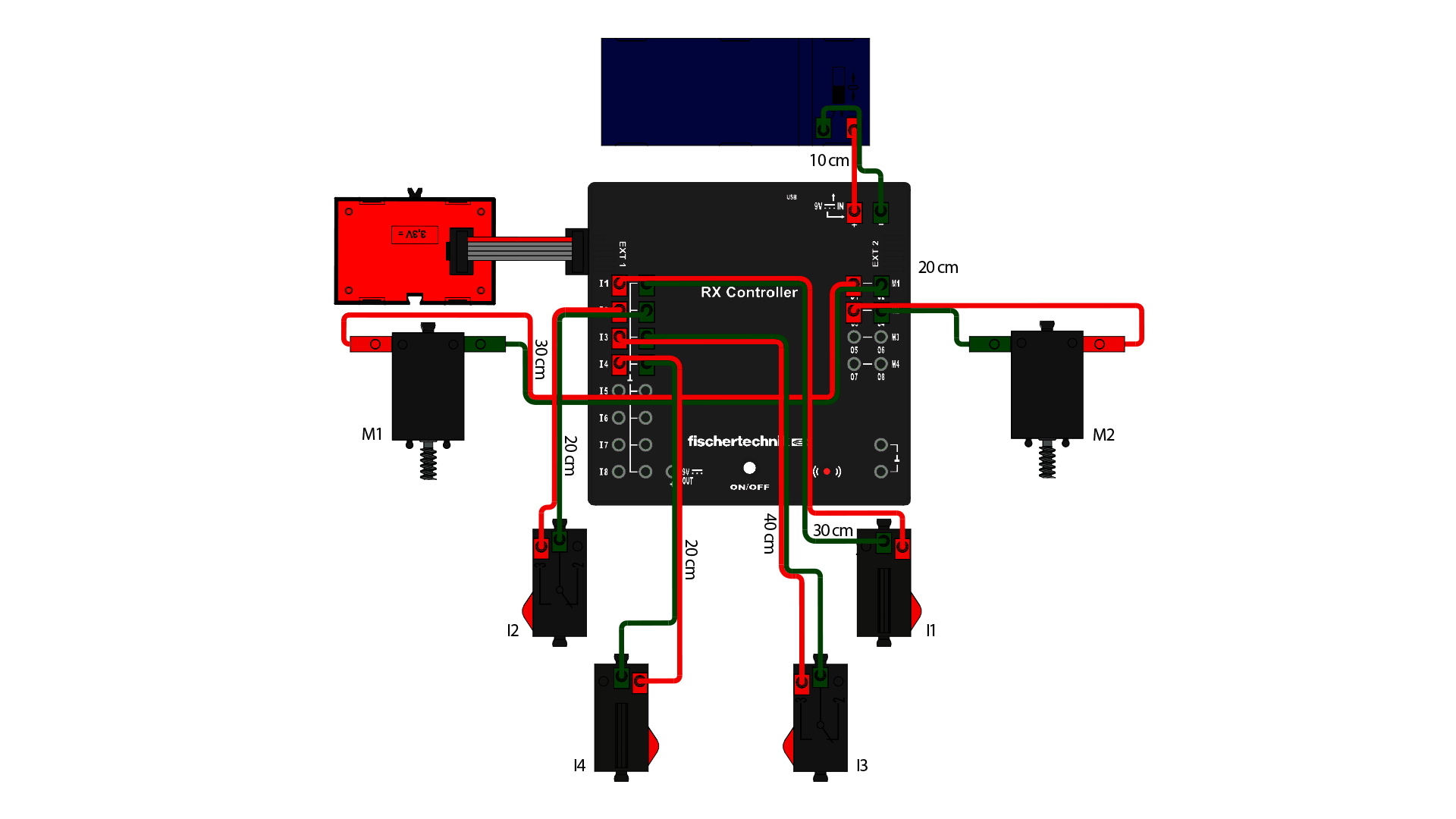
Lista de materiais do circuito básico
|
Sensores
|
Função |
|
2 Botões
|
Detecção de obstáculos |
|
2 Botões |
Contagem de impulsos dos motores
|
|
Diferenciação: 1 sensor de gestos RGB
|
Evita queda de uma posição elevada |
|
|
|
|
|
Função |
|
2 Motores
|
Cada um para um eixo |
{kind=link}