
Eu vou pegar você!
Possibilidades de diferenciação
Alunos mais rápidos podem receber a tarefa de estender ou encurtar o tempo de jogo.
Aspectos motivacionais
Os alunos conhecem as máquinas de agarrar de diferentes locais do dia a dia. Talvez eles já tenham operado uma dessas máquinas de agarrar. Agora, estar do "lado da produção" em vez do "lado do operador" pode enchê-los de orgulho.
|
Função dos Sensores/Atuadores
|
Solução Técnica |
|
Captura de gestos
|
Avaliação dos sinais no sensor de gestos |
|
Emissão de luz |
Iluminação do LED vermelho |
|
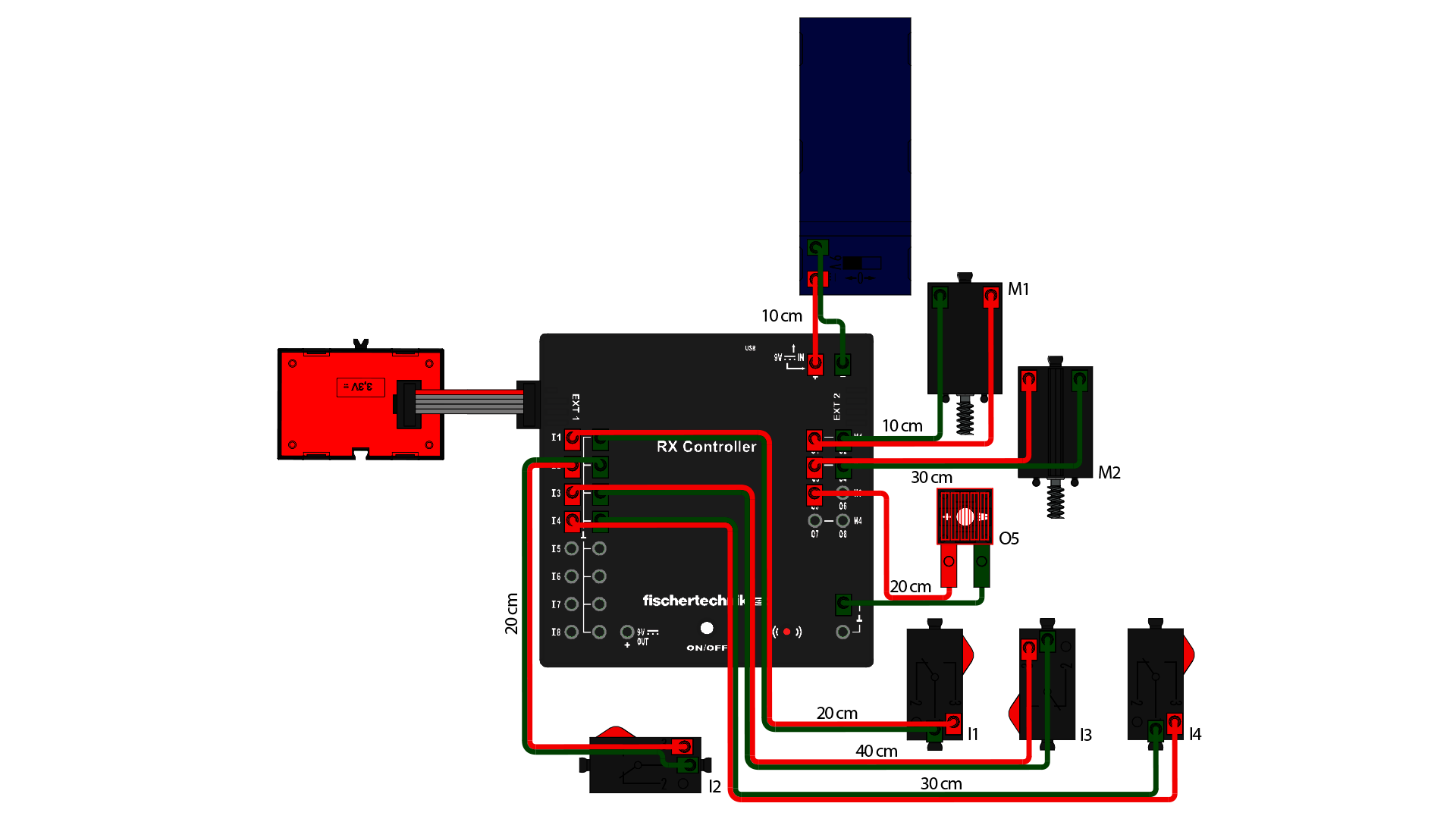
Sensores
|
Função |
|
1 sensor de gestos RGB
|
Reconhecimento de gestos para direita/esquerda e frente/trás |
|
2 botões
|
Interruptores de fim de curso para os eixos x e y |
|
2 botões de pulso
|
Contador de rotações por eixo (x/y) em passos de 90° |
|
|
|
Atuadores
|
Função
|
|
1 motor eixo x
|
Movimento para frente/para trás |
|
1 motor eixo y
|
Movimento para frente/para trás |
|
1 LED
|
Indicação do fim do tempo de jogo |

{kind=link}