- Products
- Toys
- Schools
- Industry and Universities
- Maker
- Apps and Software
- Service
- Home
- Schools
- Learning material
- SCUAI Add On Industrial Robots

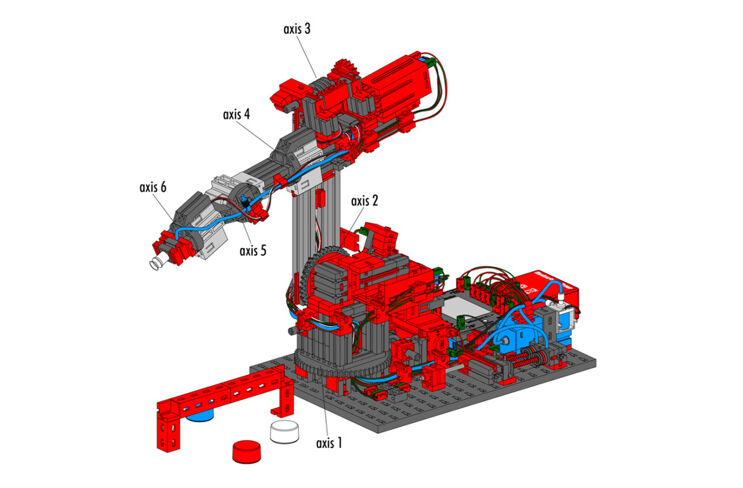
Introduction to industrial robots
Industrial robots have become an integral part of the modern manufacturing industry. They are mostly used in factories to carry out repetitive tasks quickly and with high precision. In this introduction, we will look at their structure and basic functionality. We take a look at the history of their development and find out why industrial robots have become indispensable in many industries today.