
Seguro em movimento no percurso
Possibilidades de diferenciação
Dependendo da duração da série de aulas e da capacidade dos alunos, pode-se
Aspectos motivacionais
O trabalho com veículos de transporte autônomos (FTF) conecta-se diretamente às experiências cotidianas dos alunos. Já no treinamento de condução, eles percebem como poucas linhas de programação podem colocar um veículo em movimento de forma confiável – um feedback direto que apresenta alta motivação e desperta curiosidade. No seguidor de linha digital, a relação com o cotidiano se intensifica por meio de paralelos com robôs aspiradores, cortadores de grama robóticos ou sistemas de assistência ao motorista, que reconhecem linhas e evitam obstáculos de forma autônoma. A ideia de que o FTF agora pode “ver” e reagir como um robô promove a identificação com a tarefa e aumenta o interesse pelo teste prático.
O seguidor de linha analógico oferece, com o uso de câmeras e tecnologia de controle, insights interessantes sobre tecnologias veiculares modernas
como assistentes de manutenção de faixa. Aqui fica claro como alterações nos parâmetros ou a adição de um componente diferencial influenciam o comportamento de condução – um campo experimental motivador.
Com o seguidor de linha com IA, finalmente, a Inteligência Artificial se torna o foco: os alunos vivenciam como o treinamento de uma rede neural melhora o comportamento de condução. Isso cria uma ponte para discussões atuais sobre IA no cotidiano e oferece aos alunos a oportunidade de entender e aplicar tecnologias do futuro por conta própria.
|
|
|
|
Rotação dos motores encoder |
Ajuste de velocidade para controle do veículo |
|
Mini botão |
Detecção de obstáculos (FTF 1) |
|
|
|
| Medição de distâncias | Evitar colisões (FTF 2, FTF 4) |
FTF 2: Reconhecimento de cores por câmera USB |
Reação a áreas coloridas |
FTF 3: Reconhecimento de faixa por câmera USB |
Manutenção da faixa com auxílio de um controlador P e um controlador PD |
| FTF 4: Reconhecimento de faixa por sensor de faixa |
|
| Outras possibilidades de diferenciação | Otimização do controle de velocidade, otimização das estratégias para desviar de obstáculos, otimização da estratégia para reencontrar a faixa em caso de perda total da faixa, concepção de um veículo próprio com equipamento de sensores escolhido |
|
Sensores
|
Função |
|
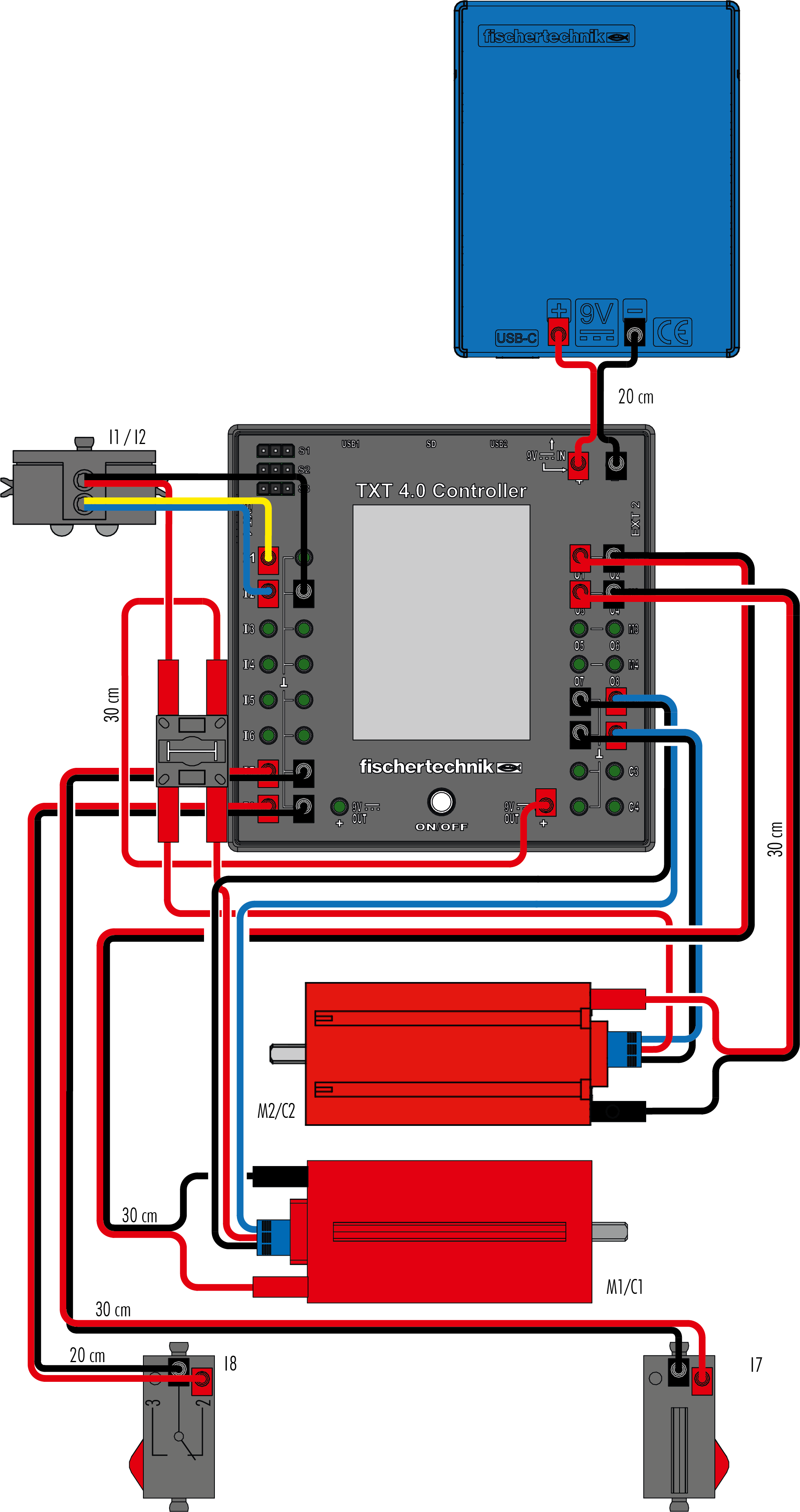
1 botão On/Off no controlador TXT 4.0 |
Ligar o FTF |
|
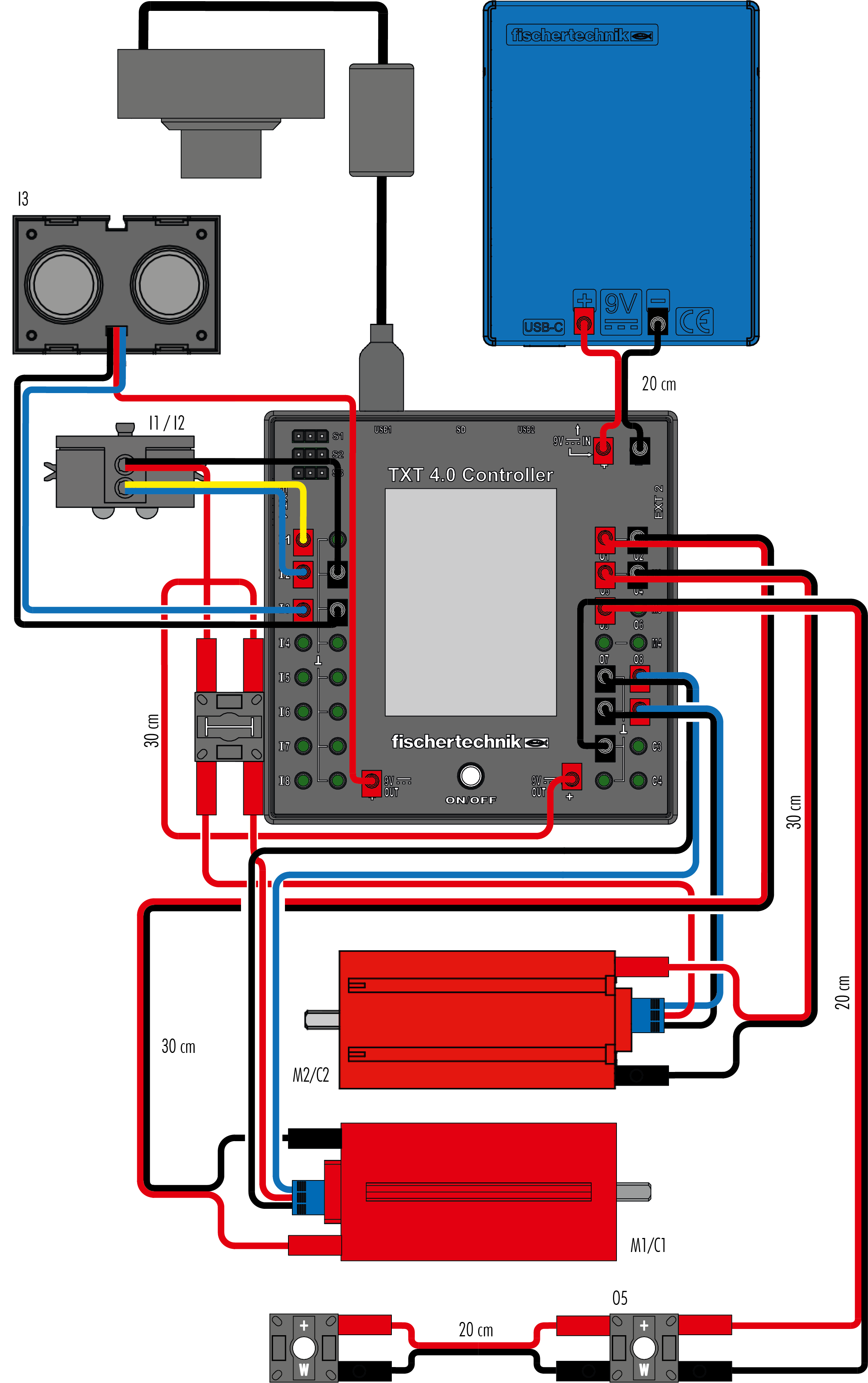
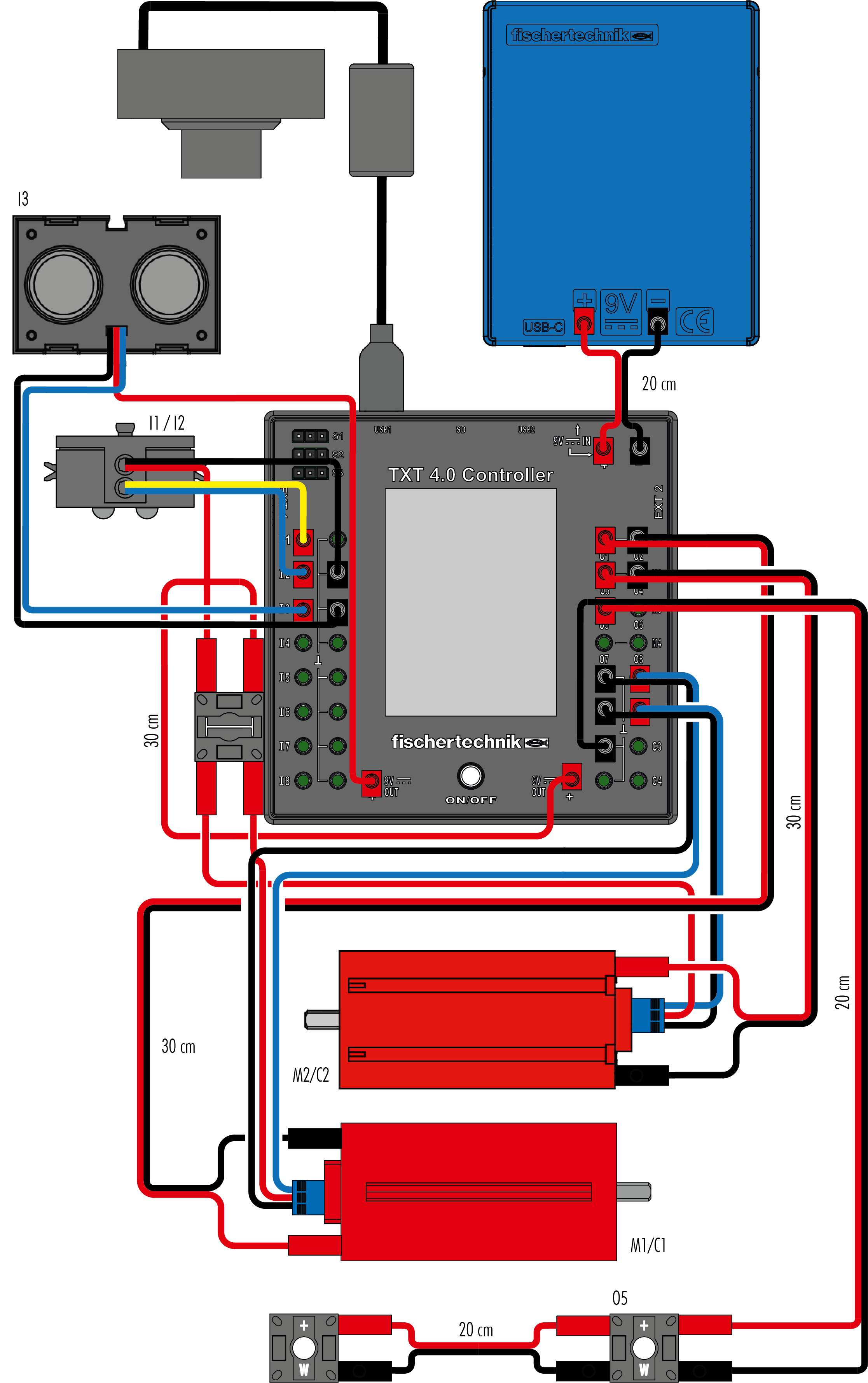
2 mini botões |
Detecção de obstáculos (FTF 1) |
| 1 sensor de pista (com 2 sensores IR) | Detecção de pista (FTF 1–2, FTF 4) |
| 1 sensor ultrassônico | Medição de distância (FTF 2, FTF 4) |
| 1 câmera USB | Detecção de cor (FTF 2) Detecção de pista (FTF 3) |
|
Atuadores |
Função |
|
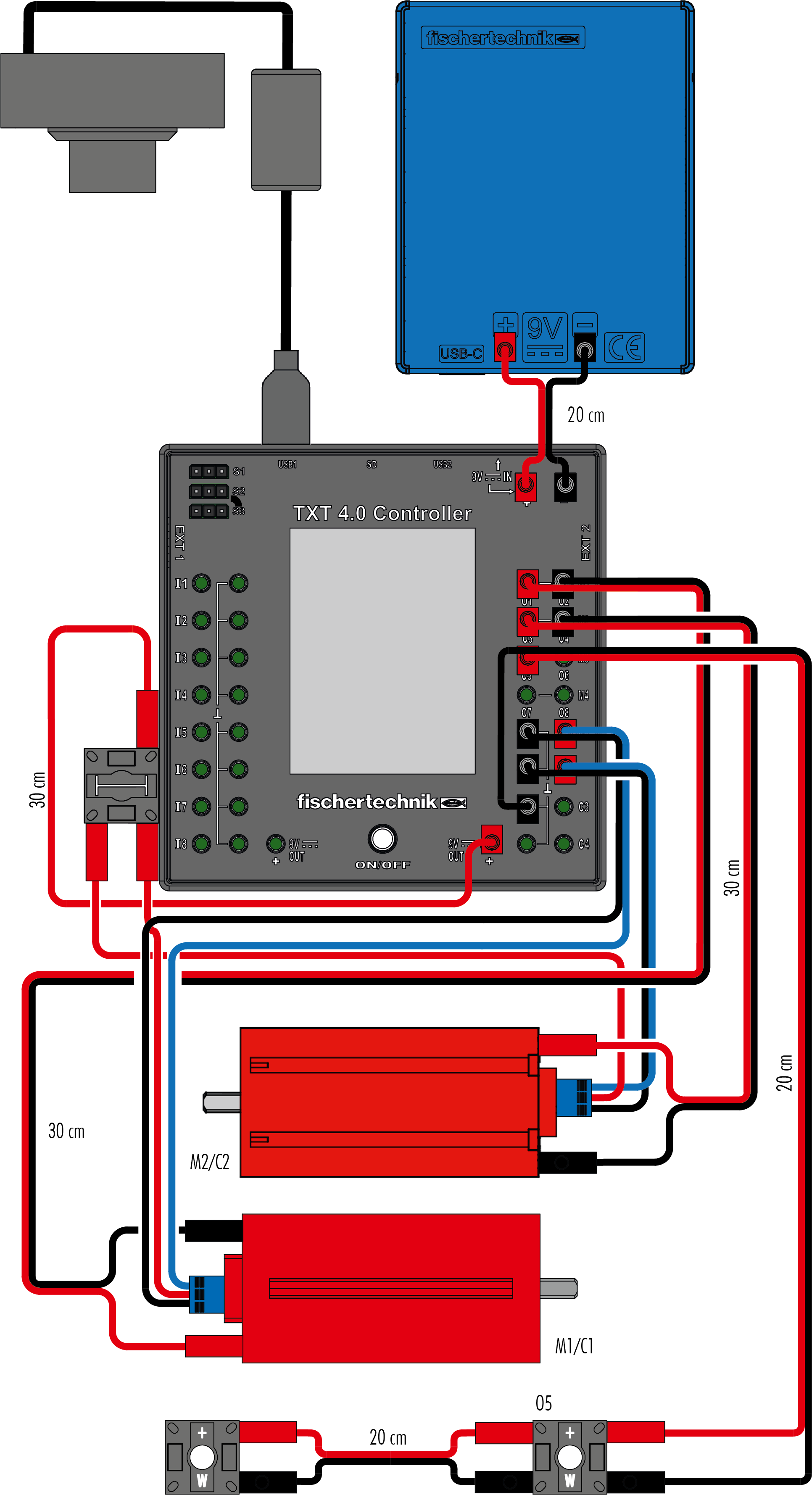
2 motores com encoder |
Movimento dos veículos |
| 2 LEDs (2 × branco) | Faróis (FTF 2–4) |

{kind=link}
{kind=link}
{kind=link}
{kind=link}