- Home
- Schools
- Learning material
- STEM Coding Ultimate AI
- Automated Guided Vehicle

Safely on the road
Differentiation options
Depending on the duration of the lesson series and the strength of the students,
Motivational aspects
Working with driverless transport vehicles (AGVs) is directly linked to the daily experiences of students. Even during driving training, they experience how only a few lines of the program set a vehicle reliably in motion - direct feedback that shows a high level of motivation and arouses curiosity. With the digital track tracker, everyday reference is reinforced by parallels to robotic vacuum cleaners, robotic lawn mowers or driver assistance systems that recognise lines and automatically avoid obstacles. The idea that the AGV can now “see” and react like a robot promotes identification with the task and increases interest in practical testing.
The analogue track tracker with camera use and control technology opens up exciting insights into modern vehicle technologies
such as Lane Keeping Assist. Here, it becomes clear how parameter changes or the addition of a differential component influence the handling characteristics - a motivating field of experimentation.
Finally, with the AI line follower, artificial intelligence takes centre stage: Students experience how training a neural network improves driving behaviour. This bridges current discussions about AI in everyday life and gives SuS the opportunity to understand and apply future technologies themselves.
|
|
|
|
Rotation of the encoder motors |
Speed adjustment for Controlling the vehicle |
|
Mini button |
Obstacle detection (FTF 1) |
|
|
|
| Measuring distances | Collision avoidance (FTF 2, FTF 4) |
FTF 2: Colour recognition by USB camera |
Reaction to painted surfaces |
FTF 3: Lane recognition by USB camera |
Lane-keeping using a P controller and a PD controller |
| FTF 4: Lane recognition by lane sensor |
|
| Further differentiation options | Optimization of speed control, optimization of strategies for avoiding obstacles, optimization of strategy for regaining lane in the event of complete lane loss, design of own vehicle with self-selected sensor equipment |
|
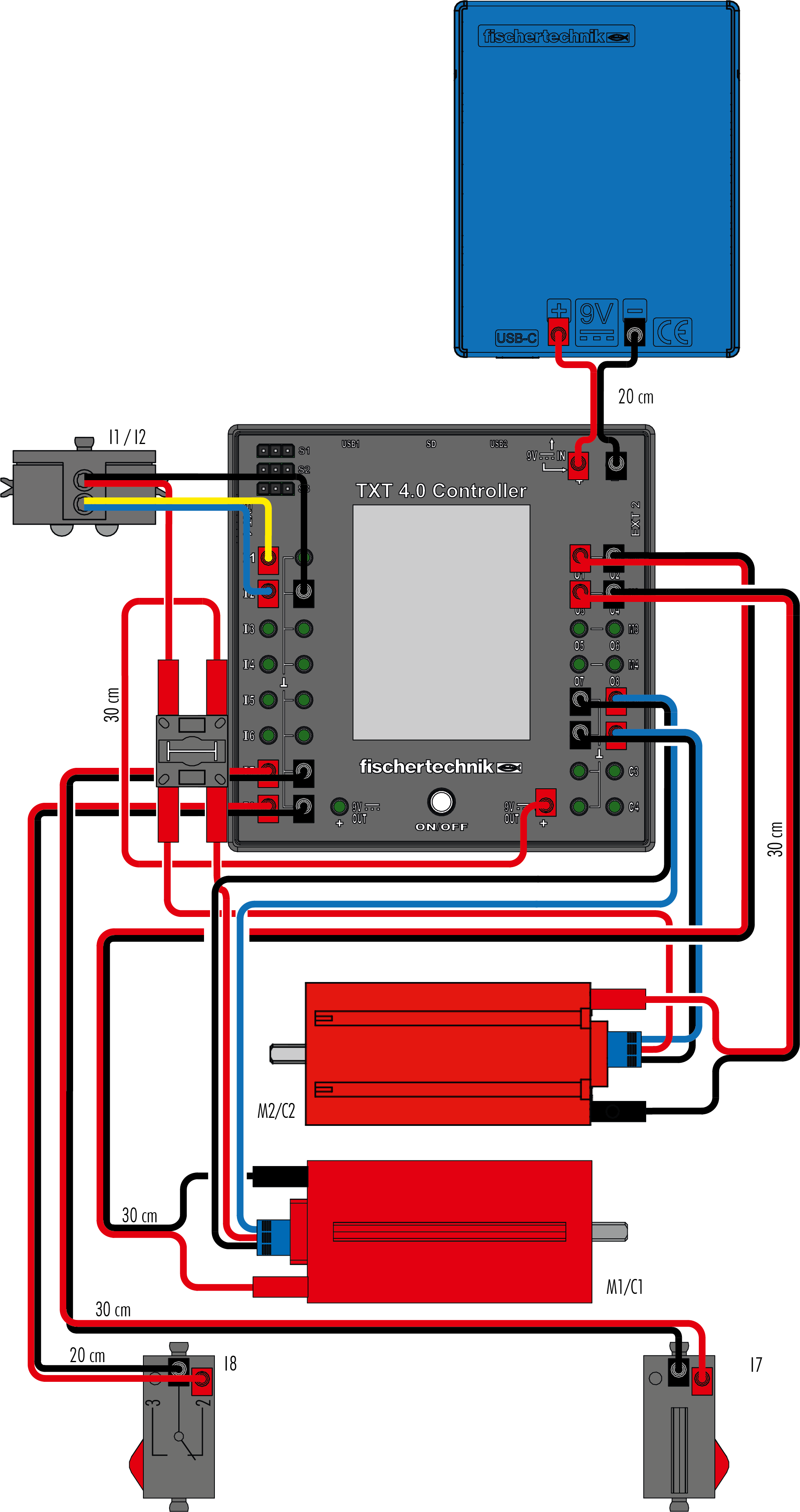
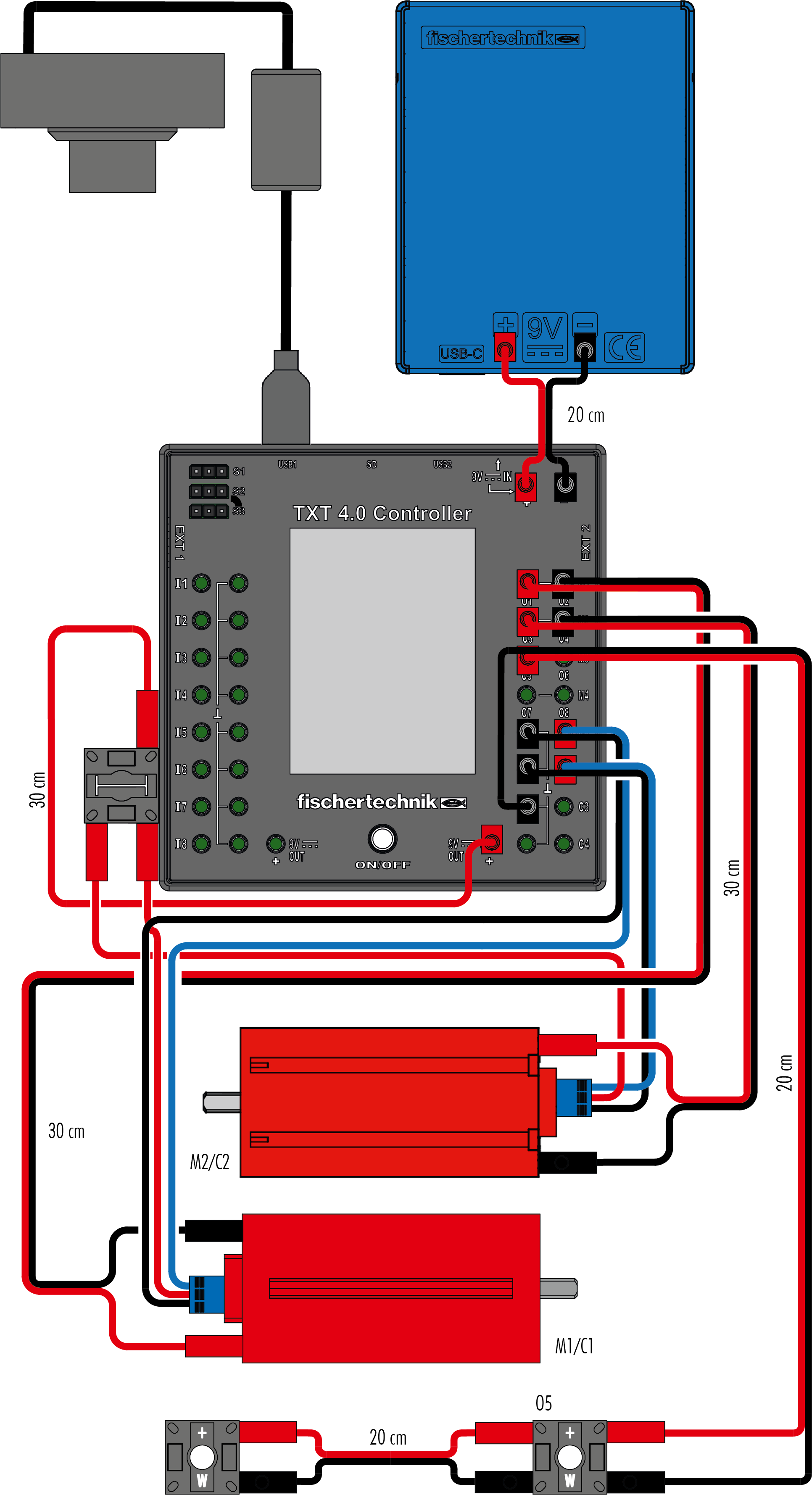
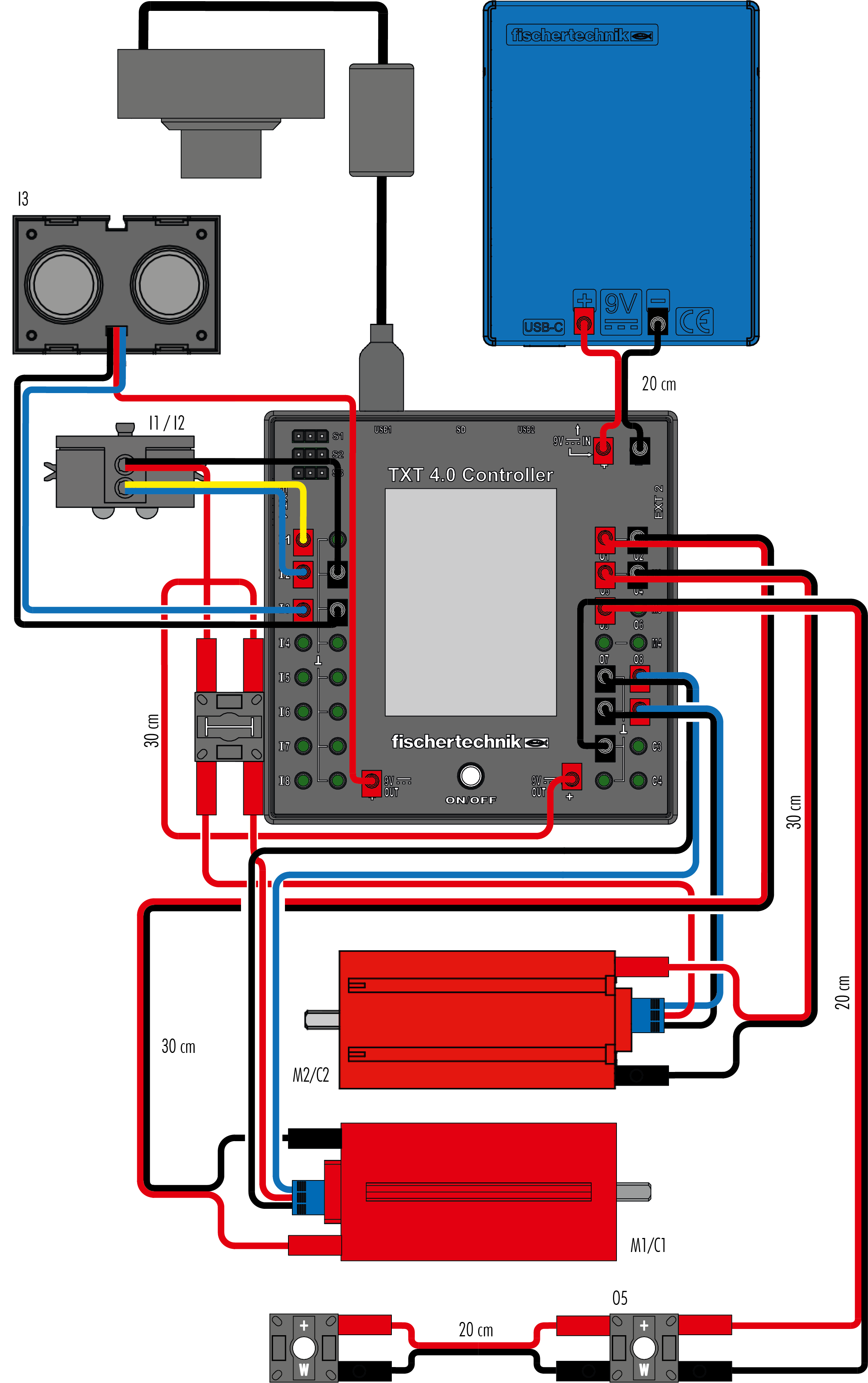
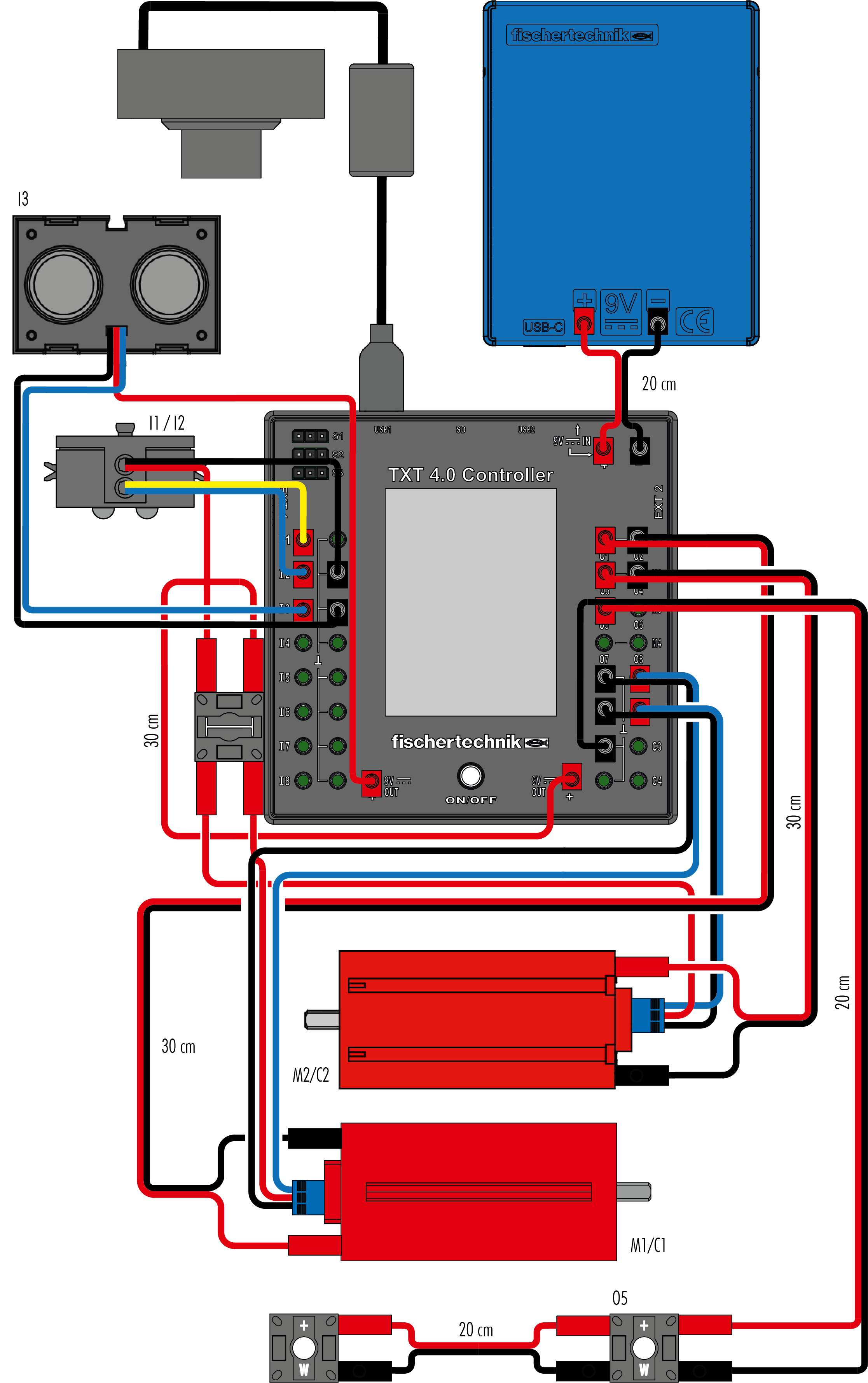
Sensors
|
Function |
|
1 On/Off button on the TXT 4.0 controller |
Switching on the AGV |
|
2 mini buttons |
Obstacle detection (FTF 1) |
| 1 track sensor (with 2 IR sensors) | Lane recognition (FTF 1-2, FTF 4) |
| 1 ultrasonic sensor | Distance measurement (FTF 2, FTF 4) |
| 1 USB camera | Colour recognition (FTF 2) Lane recognition (FTF 3) |
|
Actuator |
Function |
|
2 encoder motors |
Drive systems |
| 2 LEDs (2 × white) | Headlights (FTF 2-4) |

{kind=link}
{kind=link}
{kind=link}
{kind=link}